Spin-polarised-current-driven domain wall¶
Author: Marijan Beg, Weiwei Wang
Date: 18 Mar 2016
This notebook can be downloaded from the github repository, found here.
Problem specification¶
The simulated sample is a 1D nanowire cuboid with \(L=1000 \,\text{nm}\) length with finite difference discretisation \(d_{x} = d_{y} = d_{z} = 2 \,\text{nm}\).
The material parameters (similar to permalloy) are:
- exchange energy constant \(A = 1.3 \times 10^{-11} \,\text{J/m}\),
- magnetisation saturation \(M_\text{s} = 8.6 \times 10^{5} \,\text{A/m}\),
- uniaxial anisotropy constant \(K=5 \times 10^{4} \,\text{J/m}^{3}\) with \((0, 0, 1)\) easy-axis,
- Gilbert damping \(\alpha = 0.5\).
After the system is relaxed to a domain wall, a spin-polarised current with \(J=1 \times 10^{12} \text{A/m}^{2}\) density is applied in the positive x direction \((1, 0, 0)\).
Simulation functions¶
In [1]:
import matplotlib.pyplot as plt
import numpy as np
from fidimag.micro import Sim, UniformExchange, UniaxialAnisotropy
from fidimag.common import CuboidMesh
%matplotlib inline
We start by defining parameters and a function for initialising the system so that it relaxes to the domain wall.
In [2]:
Ms = 8.6e5 # magnetisation saturation (A/m)
A = 1.3e-11 # exchange energy constant (J/m)
alpha = 0.5 # Gilbert damping
gamma = 2.211e5 # gyromagnetic ration (m/As)
K = 5e4 # uniaxial anisotropy constant (J/m**3)
J = 1e12 # spin-polarised current density (A/m**2)
beta = 1 # STT parameter
def init_m(pos):
x = pos[0]
if x < 200:
return (1, 0, 0)
elif 200 <= x < 300:
return (0, 1, 1)
else:
return (-1, 0, 0)
Using this function, we create a new function which relaxes the system to its equilibrium (domain wall) state according to the problem specification.
In [3]:
def relax_system(mesh):
# Create a simulation object.
sim = Sim(mesh)
# Set simulation parameters.
sim.driver.set_tols(rtol=1e-8, atol=1e-8)
sim.driver.alpha = alpha
sim.driver.gamma = gamma
sim.Ms = Ms
# Add energies to the system.
sim.add(UniformExchange(A=A))
sim.add(UniaxialAnisotropy(K))
# Initialise the system.
sim.set_m(init_m)
# Relax the system and save the state in m0.npy
sim.driver.relax(dt=1e-14, stopping_dmdt=0.01, max_steps=5000,
save_m_steps=None, save_vtk_steps=None)
np.save('m0.npy', sim.spin)
A plot of the system’s magnetisation can be created using the following convenience function.
In [4]:
def plot_magnetisation(components):
plt.figure(figsize=(8, 6))
comp = {'mx': 0, 'my': 1, 'mz': 2}
for element in components:
data = np.load(element[0])
data.shape = (-1, 3)
mc = data[:, comp[element[1]]]
# The label is the component and the file name
plt.plot(mc, label=element[1])
plt.legend()
plt.xlabel('x (nm)')
plt.ylabel('mx, my')
plt.grid()
plt.ylim([-1.05, 1.05])
Finally, we create a function for driving a domain wall using the spin-polarised current. All npy and vtk files are saved in the **{simulation_name}_npys** and **{simulation_name}_vtks** folders, respectively.
In [5]:
def excite_system(mesh, time, snapshots):
# Specify the stt dynamics in the simulation
sim = Sim(mesh, name='dyn', driver='llg_stt')
# Set the simulation parameters
sim.driver.set_tols(rtol=1e-12, atol=1e-14)
sim.driver.alpha = alpha
sim.driver.gamma = gamma
sim.Ms = Ms
# Add energies to the system.
sim.add(UniformExchange(A=A))
sim.add(UniaxialAnisotropy(K))
# Load the initial state from the npy file saved in the realxation stage.
sim.set_m(np.load('m0.npy'))
# Set the spin-polarised current in the x direction.
sim.driver.jx = J
sim.driver.beta = beta
# The simulation will run for x ns and save
# 'snaps' snapshots of the system in the process
ts = np.linspace(0, time, snapshots)
for t in ts:
sim.driver.run_until(t)
sim.save_vtk()
sim.save_m()
Simulation¶
Before we run a simulation using previously defined functions, a finite difference mesh must be created.
In [6]:
L = 2000 # nm
dx = dy = dz = 2 # nm
mesh = CuboidMesh(nx=int(L/dx), ny=1, nz=1, dx=dx, dy=dy, dz=dz, unit_length=1e-9)
Now, the system is relaxed and the domain wall equilibrium state is obtained, saved, and later used in the next stage.
In [7]:
%%capture
relax_system(mesh);
Plot the magnetisation components of the relaxed state.
In [8]:
plot_magnetisation([['m0.npy', 'mx'], ['m0.npy', 'my'], ['m0.npy', 'mz']])
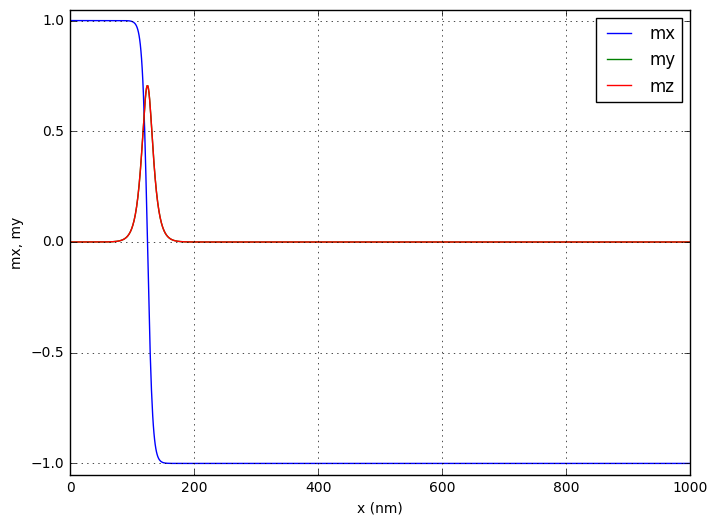
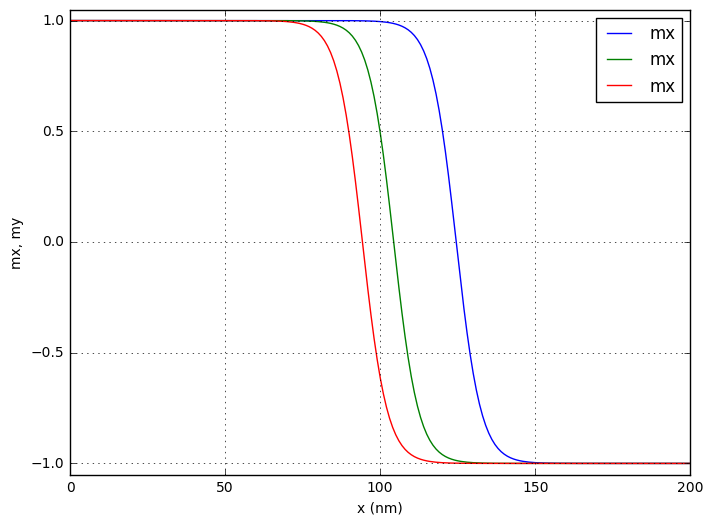
The DW is at the maximum value of \(|m_z|\) or \(|m_y|\). Consequently, the domain wall position is:
In [9]:
m0_z = np.load('m0.npy').reshape(-1, 3)[:, 2]
x = np.arange(len(m0_z))
index_max = np.argmax(np.abs(m0_z))
print('Maximum |m_z| at x = %s' % x[index_max])
Maximum |m_z| at x = 124
Using the obtained domain wall equilibrium state, we now simulate its motion in presence of a spin-polarised current.
In [10]:
# PYTEST_VALIDATE_IGNORE_OUTPUT
excite_system(mesh, 1.5e-9, 151);
We plot once again to compare the initial state with the ones after a SP current was applied.
In [11]:
# We can plot the m_x component for a number snapshots
# to observe the DW motion
# We will plot the 100th and 150th files (we can also compute
# until the system reaches ~5 ns to improve the effect)
plot_magnetisation([['m0.npy', 'mx'],
['dyn_npys/m_100.npy', 'mx'],
['dyn_npys/m_150.npy', 'mx']])
plt.xlim([0, 200])
Out[11]:
(0, 200)